


Field coverage
Field coverage proposes a route for autonomous tractors, lawn movers, or drones to cover selected area. Set rows distance and their angle. Draw the field shape, define start and end position, and let the service do the magic. Algorithm returns trajectory in a second.

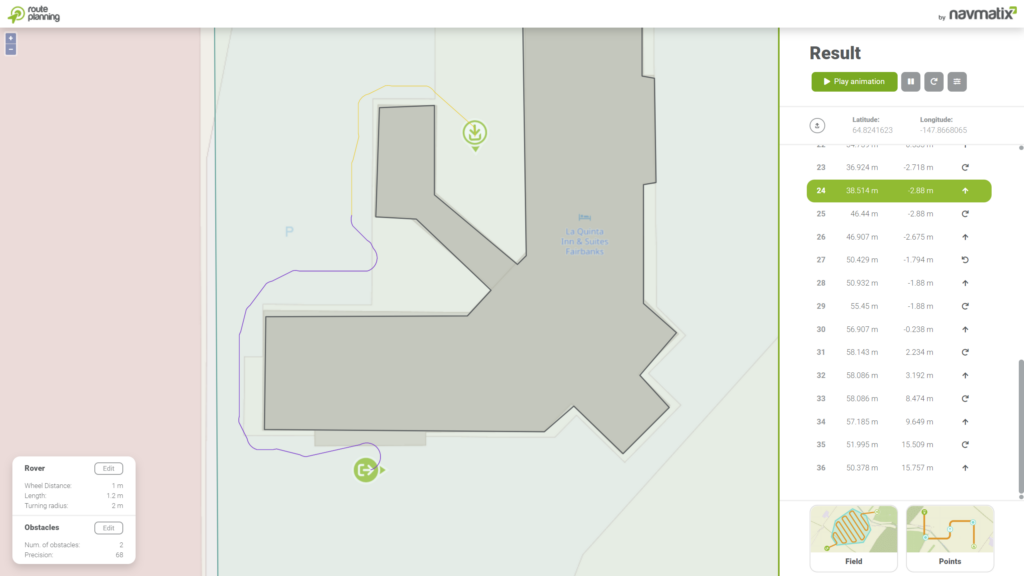
Path finding
Path finding is great in situation when moving rover from start to end point, while avoiding obstacles along the way. Select start point, end point, a fence in which rover must stay in and draw the obstacles. Algorithms finds a way to reach the end point.
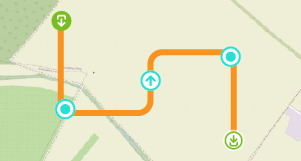
Waypoint crossing
Waypoint crossing is useful when rover needs to visit multiple spots from a given angle. Place the start point, end point and other waypoints to the map. Algorithm finds a way through those points in the selected order.

Navmatix
Corporate web site

Glopos.net
Everything you need to deliver GNSS corrections

GNSS Mission Planning
Free tool for GNSS Mission Planning